×


| 分类 | 项目 | 规格 / 定义说明 |
|---|---|---|
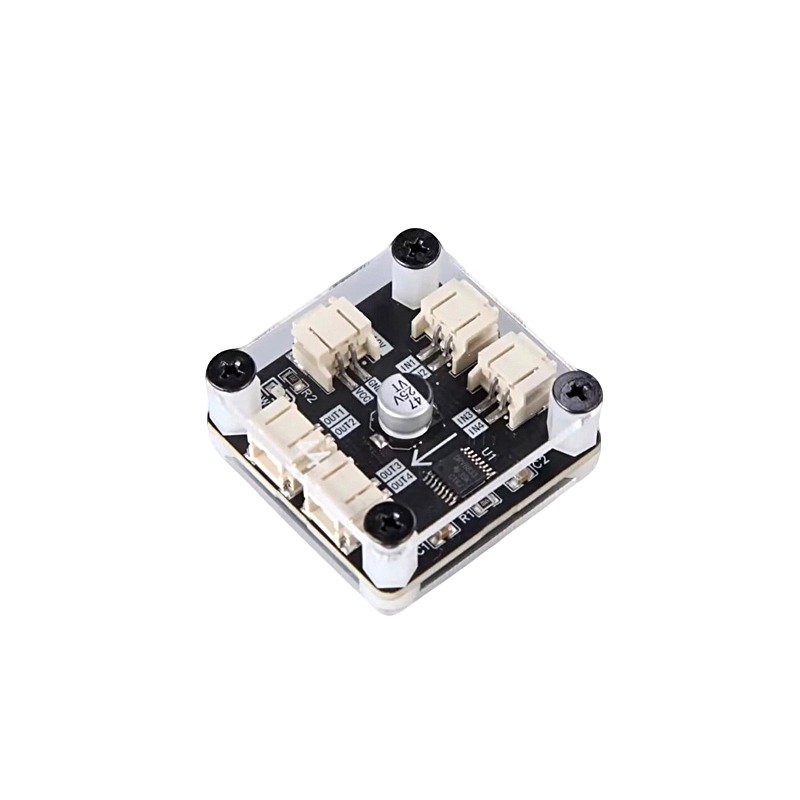
| 基础信息 | 模块名称 | 两路电机驱动模组 |
| 核心功能 | 控制 2 路直流电机正反转、刹车、PWM 调速 | |
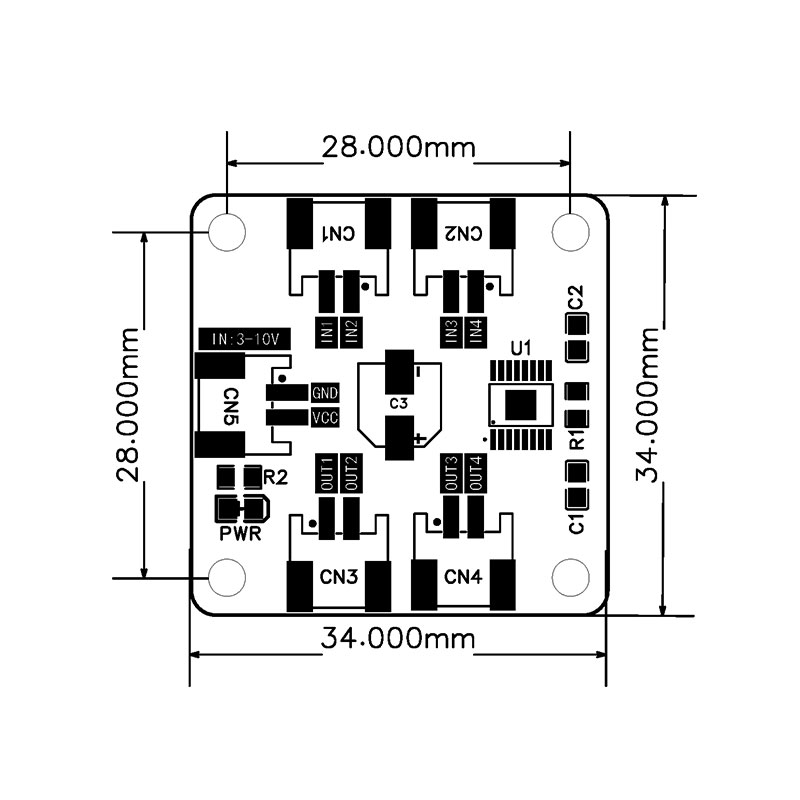
| PCB 尺寸 | 34.00mm × 34.00mm(带 4 个安装孔) | |
| 适配场景 | TT/N20/N30 小型直流减速电机、智能小车、机器人云台 | |
| 电气参数 | 电机供电电压 | 3V~10V DC |
| 逻辑控制电压 | 3.3V~5V DC(兼容 Arduino/STM32/ESP32) | |
| 单路持续电流 | 最大 1.5A(峰值电流更高,需配合散热) | |
| 控制方式 | IN1/IN2/IN3/IN4 直接逻辑控制,支持 PWM 调速 | |
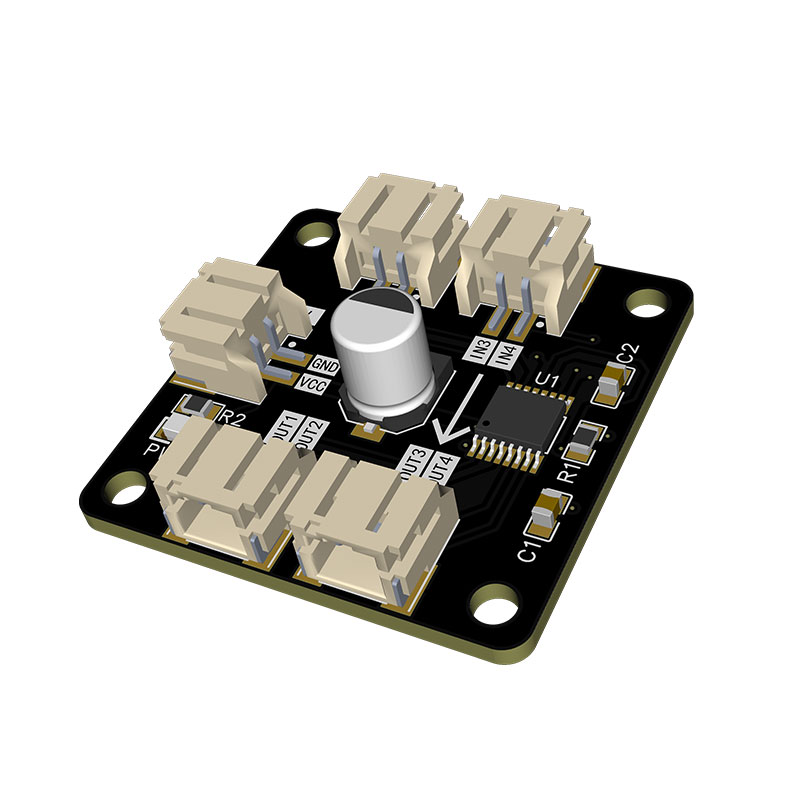
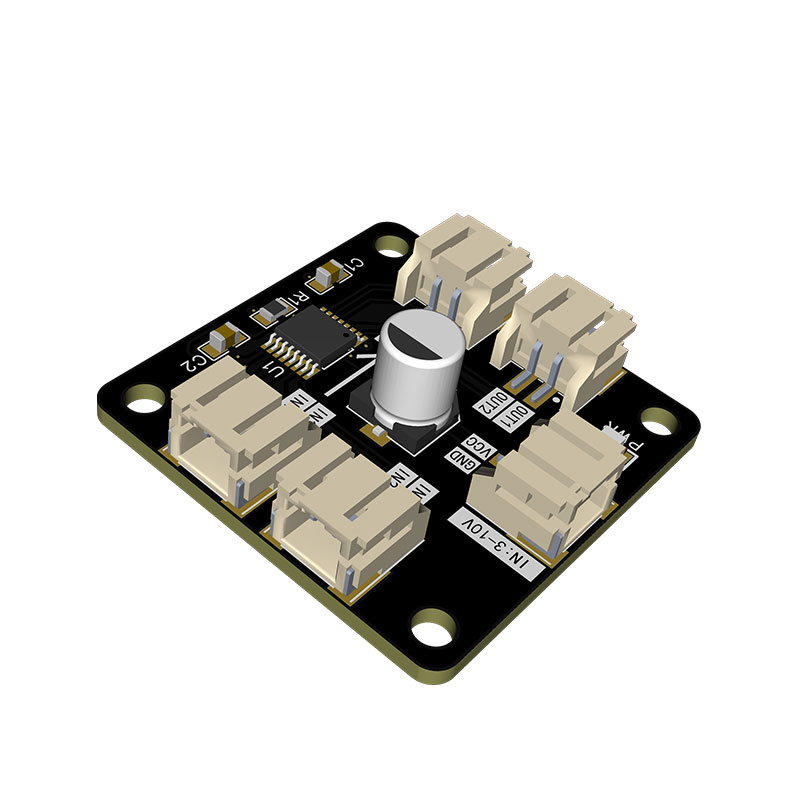
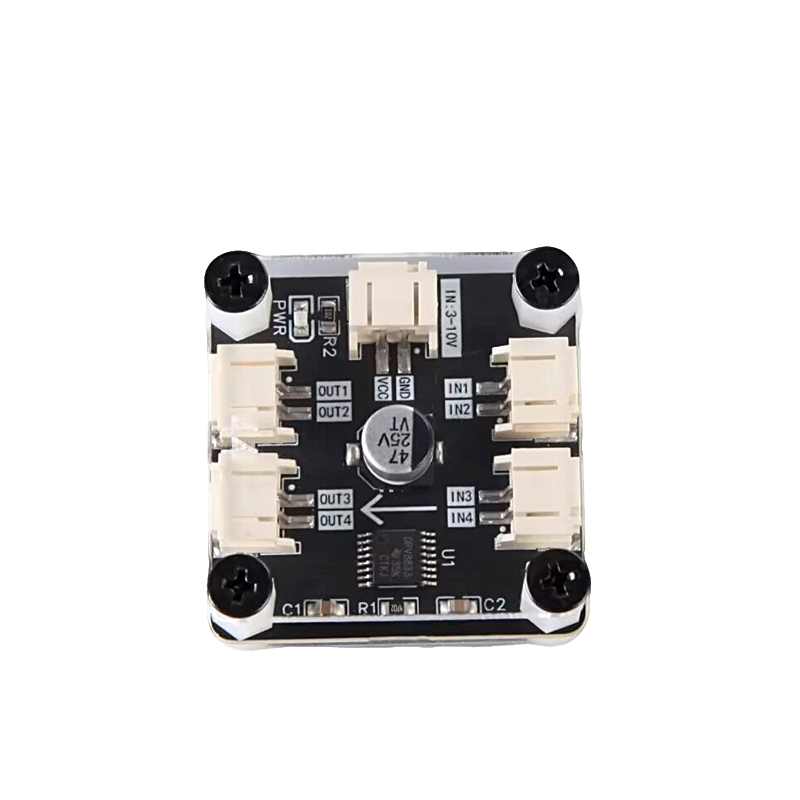
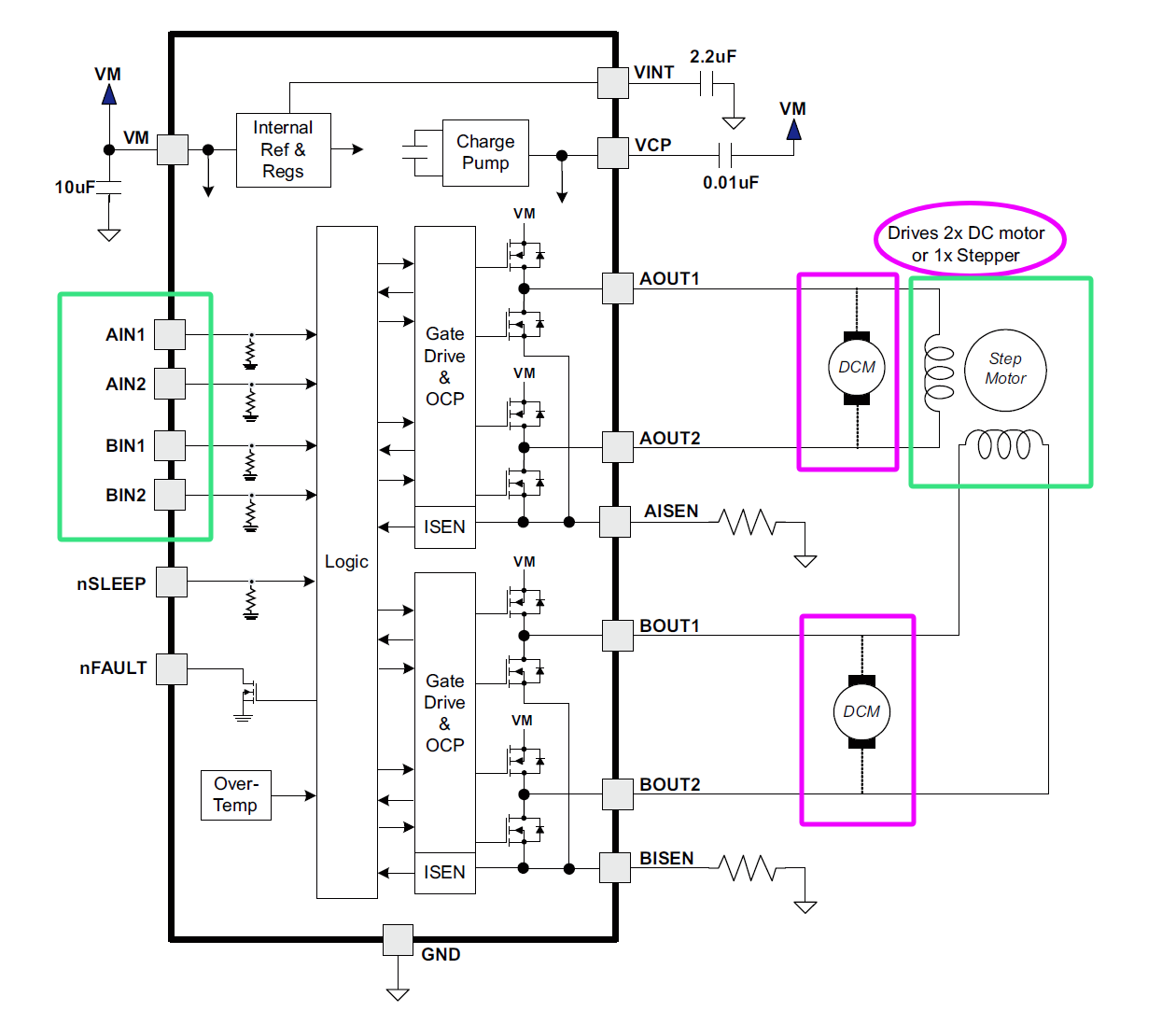
| 板载元件 | U1:H 桥驱动芯片;C3:电源滤波电容;PWR:电源指示灯;R1/R2:限流 / 上拉电阻;C1/C2:电源滤波电容 | |
| 控制接口 CN5 | GND | 电源公共地,必须与单片机共地 |
| VCC | 逻辑供电正极,接 3.3V/5V 电源 | |
| 控制输入引脚 | IN1/IN2 | 电机 1 通道逻辑输入,控制方向与刹车 |
| IN3/IN4 | 电机 2 通道逻辑输入,控制方向与刹车 | |
| 电机输出接口 | OUT1/OUT2(CN3/CN1) | 电机 1 通道驱动输出,直接接电机两端 |
| OUT3/OUT4(CN4/CN2) | 电机 2 通道驱动输出,直接接电机两端 | |
| 控制逻辑 | 正转控制 | IN1 = 高 / IN2 = 低,OUT1 (+)/OUT2 (-);IN3 = 高 / IN4 = 低,OUT3 (+)/OUT4 (-) |
| 反转控制 | IN1 = 低 / IN2 = 高,OUT1 (-)/OUT2 (+);IN3 = 低 / IN4 = 高,OUT3 (-)/OUT4 (+) | |
| 刹车模式 | IN1 = 高 / IN2 = 高,OUT1 与 OUT2 短接制动;IN3 = 高 / IN4 = 高,OUT3 与 OUT4 短接制动 | |
| 自由停止 | IN1 = 低 / IN2 = 低,电机断电滑行;IN3 = 低 / IN4 = 低,电机断电滑行 | |
| 调速方式 | 对 IN1/IN2/IN3/IN4 输入 PWM 信号,通过占空比调整转速 |

#define IN1 5
#define IN2 6
#define IN3 9
#define IN4 10
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
// 正转
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(2000);
// 刹车
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
delay(1000);
// 反转
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(2000);
// 停止滑行
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
delay(1000);
}