×




| 分类 | 参数项 | 规格 / 定义说明 |
|---|---|---|
| 基础信息 | 适配电机 |
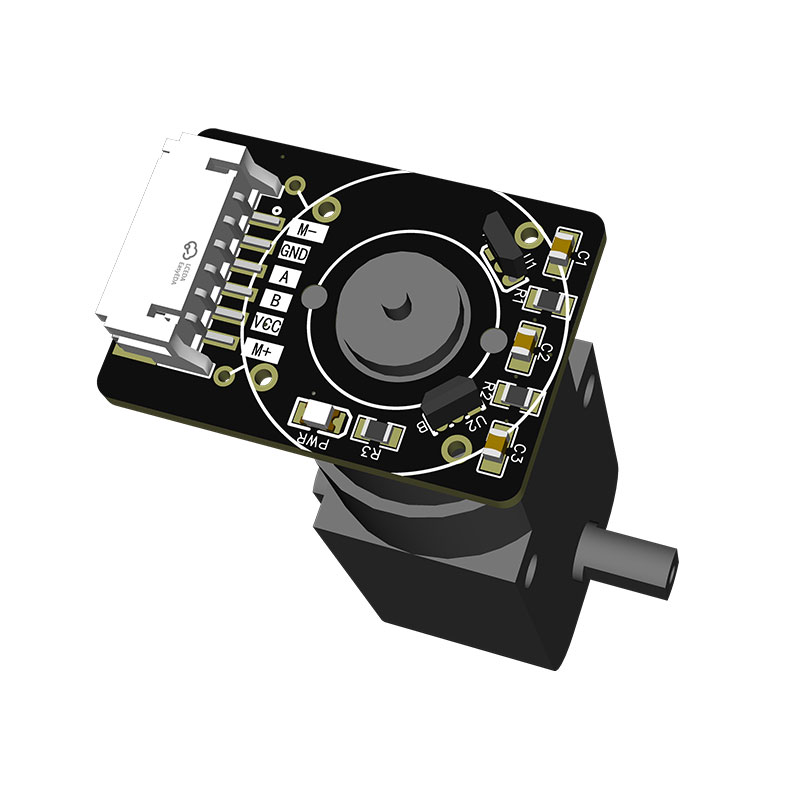
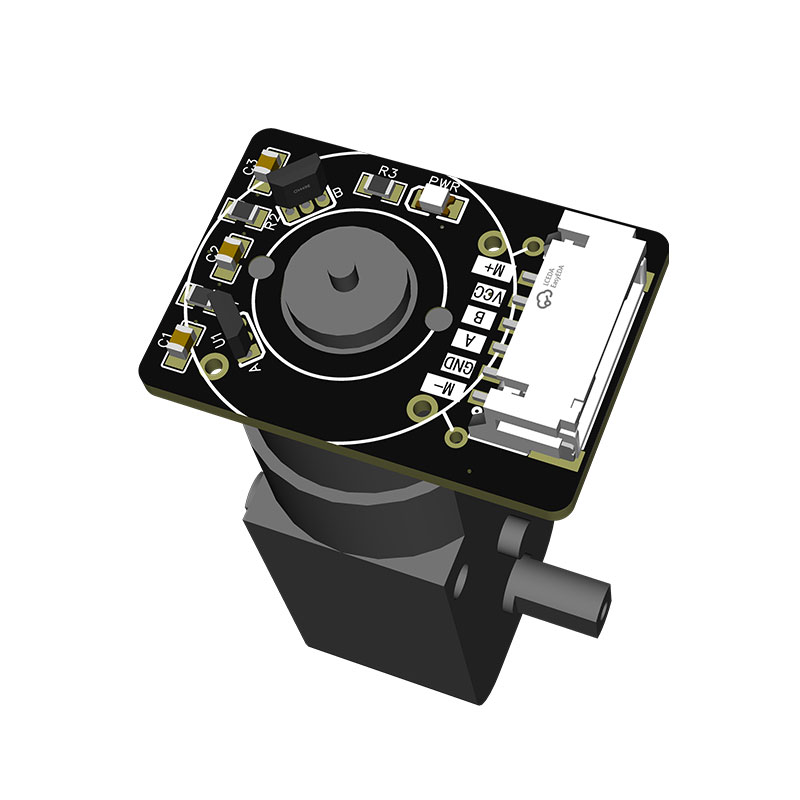
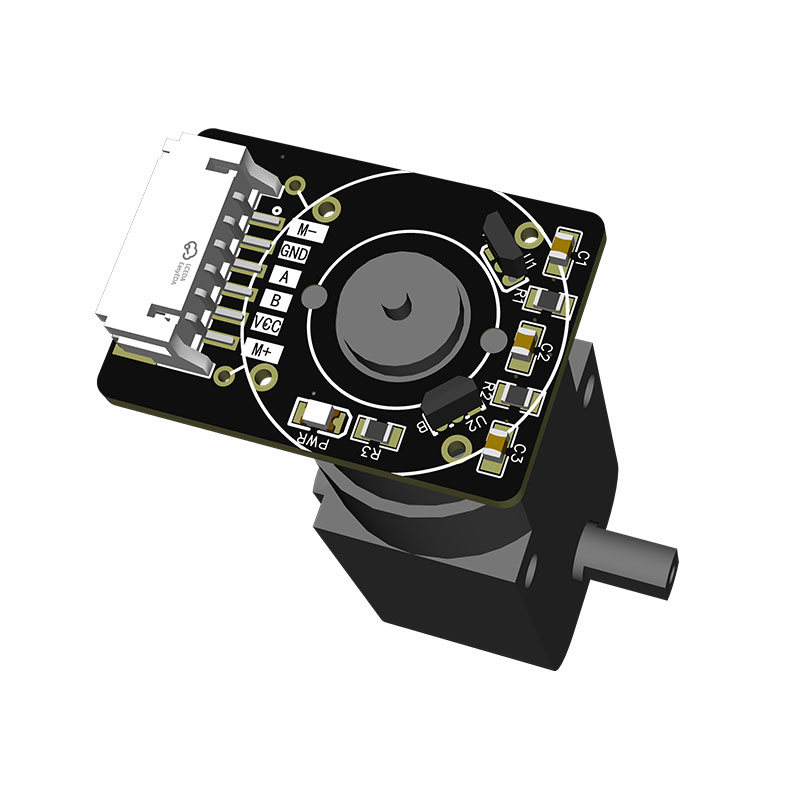
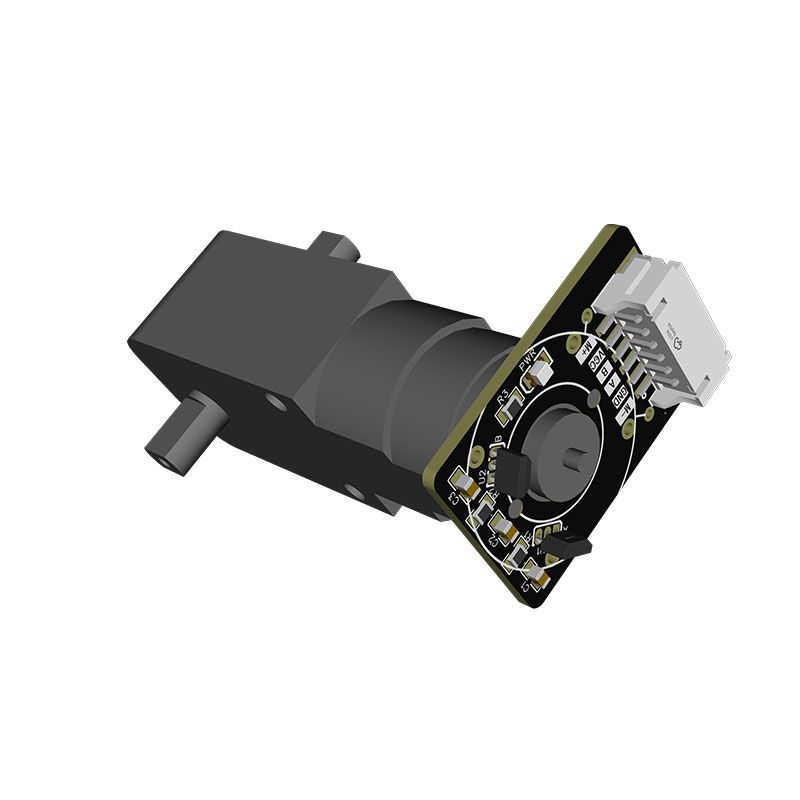
TT马达AB相霍尔编码器测速器 |
| 模块功能 | 转速脉冲检测、转向识别、速度闭环控制 | |
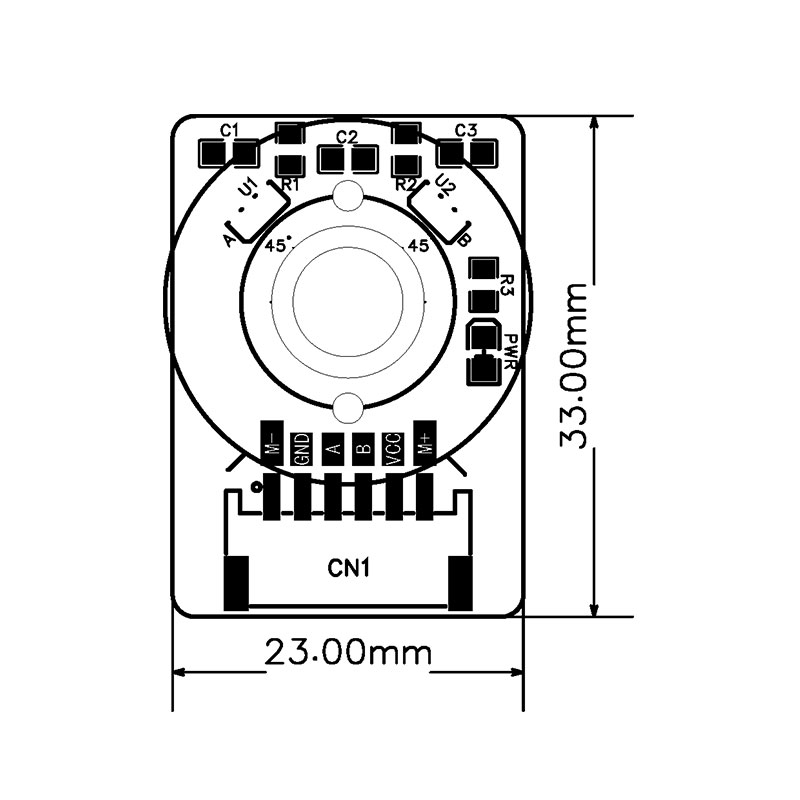
| PCB 尺寸 | 约 23.00mm × 33.00mm(适配电机尾部安装位) | |
| 编码器类型 | 双路霍尔效应 AB 相编码器(相位差 90°) | |
| 电气参数 | 工作电压 | 3.3V~5V DC(编码器供电,兼容单片机电平) |
| 工作电流 | 约 5~10mA(不含电机驱动电流) | |
| 输出信号 | AB 相方波脉冲,支持推挽输出 | |
| 分辨率 | 由减速比 + 磁铁极数决定(常见 11/12 线) | |
| 最高响应频率 | 典型值 10kHz | |
| 接口引脚(6Pin) | M+ | 电机电源正极,接驱动模块输出正 |
| M- | 电机电源负极,接驱动模块输出负 | |
| VCC | 编码器供电,接 3.3V~5V 电源 | |
| GND | 公共地,需与单片机共地 | |
| A 相 | 编码器脉冲输出 A,接单片机外部中断 / 定时器 | |
| B 相 | 编码器脉冲输出 B,配合 A 相识别转向、实现倍频计数 | |
| 安装与性能 | 安装方式 | 电机尾部同轴固定,磁铁与霍尔传感器间隙≤2mm |
| 转向识别 | 通过 A/B 相脉冲相位差判断正反转 | |
| 倍频支持 | 支持 4 倍频计数,分辨率提升 4 倍 |

#define ENC_A 2
#define ENC_B 3
volatile long pulse = 0;
bool dir = true;
void setup() {
Serial.begin(9600);
pinMode(ENC_A, INPUT_PULLUP);
pinMode(ENC_B, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(ENC_A), encoderISR, RISING);
}
void loop() {
Serial.print("脉冲数:");
Serial.print(pulse);
Serial.print(" 方向:");
Serial.println(dir ? "正转" : "反转");
delay(200);
}
void encoderISR() {
if (digitalRead(ENC_B) == LOW) {
pulse++;
dir = true;
} else {
pulse--;
dir = false;
}
}