×



| 分类 | 项目 | 规格 / 说明 |
|---|---|---|
| 基础参数 | 模块型号 |
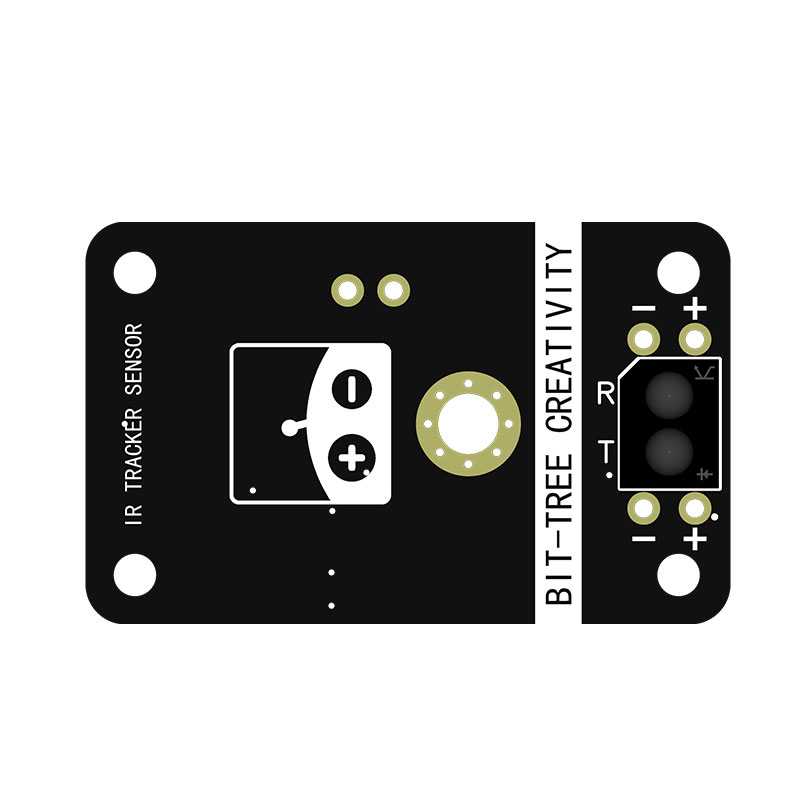
红外障碍检测模组循迹机模组 |
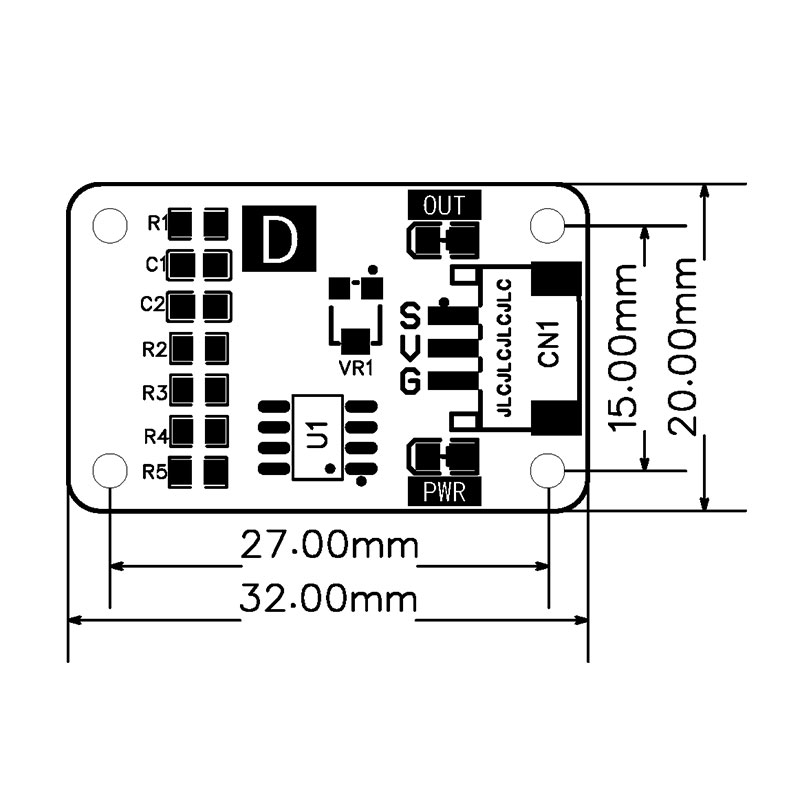
| PCB 外形尺寸 | 32.00mm × 20.00mm | |
| 核心元件 | 红外发射管 + 接收管对管、SOP8 比较器芯片(如 LM393)、灵敏度调节电位器(VR1) | |
| 检测方式 | 红外反射式检测 | |
| 检测距离 | 1~15mm 可调(通过电位器 VR1 调节) | |
| 输出信号 | 数字 TTL 电平(OUT 引脚) | |
| 供电电压 | 3.3V~5V(推荐 5V 供电,兼容 3.3V 单片机) | |
| 板载功能 | 电源指示灯(PWR)、输出状态指示灯(OUT)、灵敏度调节电位器 | |
| 接口定义(CN1/3Pin 排针) | VCC | 电源正极,接 5V/3.3V |
| GND | 电源负极,需与单片机共地 | |
| S/OUT | 检测信号输出端,接单片机数字 IO 口 | |
| 关键特性 | 双用途设计 | 可通过安装方式切换:朝下安装为循迹检测,朝前安装为障碍物检测 |
| 灵敏度可调 | 电位器可调节检测阈值,适配不同反射率的表面或障碍物 | |
| 双状态指示灯 | PWR 灯显示电源状态,OUT 灯显示检测结果,调试直观 | |
| 数字信号输出 | 无需 AD 转换,单片机直接读取 IO 电平即可判断状态 | |
| 超小体积 | 32×20mm 尺寸,适合空间受限的小型项目 |



硬件接线
- VCC → 5V
- GND → GND
- OUT → D2
#define IR_PIN 2
void setup() {
Serial.begin(9600);
pinMode(IR_PIN, INPUT);
Serial.println("红外循迹/避障模组就绪");
}
void loop() {
int val = digitalRead(IR_PIN);
if (val == HIGH) {
Serial.println("检测到黑线/障碍物");
} else {
Serial.println("无黑线/无障碍物");
}
delay(100);
}