×






| 分类 | 参数项 | 规格说明 |
|---|---|---|
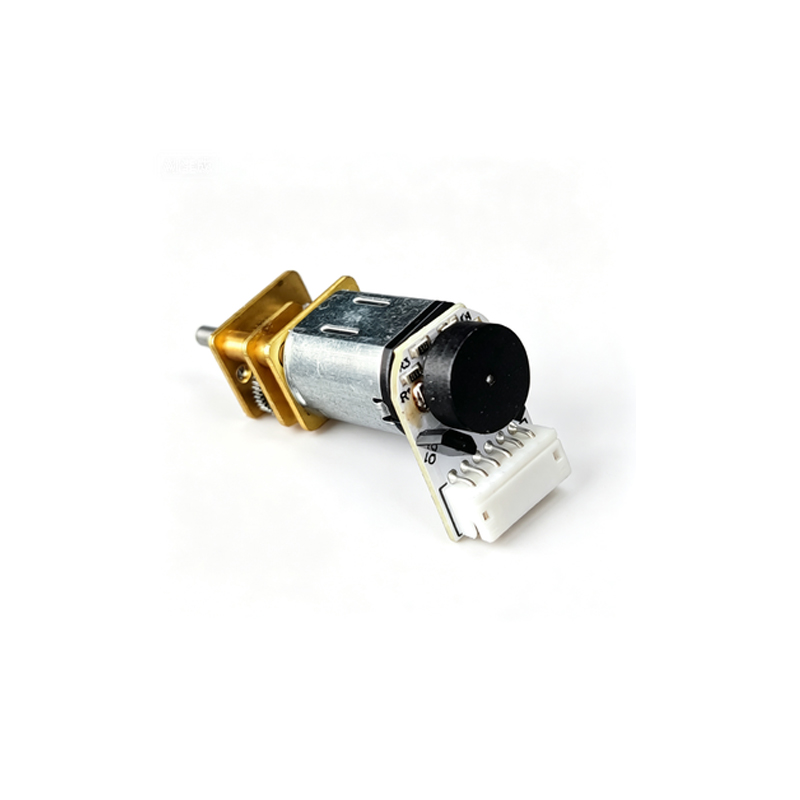
| 型号与结构 | 型号 |
N20电机带双相霍尔编码器 |
| 电机类型 | 永磁直流减速电机 | |
| 减速箱 | 金属齿轮减速箱(黄铜外壳) | |
| 编码器类型 | 双相霍尔编码器(A/B 相输出) | |
| 接口 | 6Pin 防呆插座(兼容标准 2.54mm 间距) | |
| 电气参数 | 工作电压 | 电机本体:3V~12V(常见规格:6V/12V);编码器:3.3V~5V |
| 额定电流 | 视具体转速规格而定(空载电流小,堵转电流需注意) | |
| 减速比 | 多规格可选(如 1:10、1:30、1:100 等,对应不同转速与扭矩) | |
| 编码器分辨率 | 基础脉冲数 7PPR(每转输出 7 个脉冲,减速后等效脉冲数为 7× 减速比) | |
| 轴型 | 扁位输出轴(便于固定轮子 / 连接件) | |
| 引脚定义(6Pin 接口) | M+ | 电机供电正极 |
| M- | 电机供电负极 | |
| VCC | 编码器供电正极(3.3V/5V) | |
| GND | 编码器电源地 | |
| A | 编码器 A 相脉冲输出 | |
| B | 编码器 B 相脉冲输出 | |
| 机械参数 | 重量 | 约 15g |
| 扭矩 | 视减速比而定(例如 1:100 减速比 6V 规格,额定扭矩约 0.5kg・cm) | |
| 尺寸 | 见附图 |




// 电机引脚
#define MOTOR_POS 5
#define MOTOR_NEG 6
// 编码器引脚
#define ENC_A 2
#define ENC_B 3
// 全局变量
volatile long pulse = 0;
int pwm = 150;
void setup() {
Serial.begin(9600);
// 电机初始化
pinMode(MOTOR_POS, OUTPUT);
pinMode(MOTOR_NEG, OUTPUT);
// 编码器中断
attachInterrupt(digitalPinToInterrupt(ENC_A), encoder, RISING);
// 电机正转
analogWrite(MOTOR_POS, pwm);
digitalWrite(MOTOR_NEG, LOW);
}
void loop() {
Serial.print("脉冲数:");
Serial.println(pulse);
delay(200);
}
// 编码器中断函数
void encoder() {
if (digitalRead(ENC_B) == LOW) {
pulse++;
} else {
pulse--;
}
}